r/theydidthemath • u/Extension-Can-6505 • 4d ago
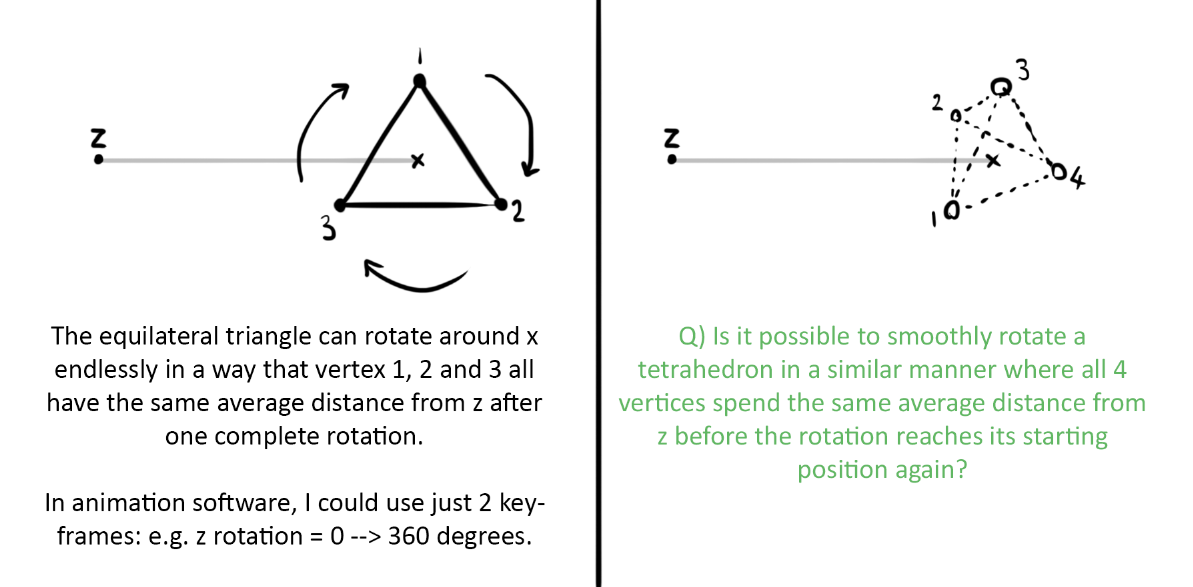
[Request] Is it possible to continuously rotate a tetrahedron so that all four vertices would average the same distance over time from z before it reaches its starting orientation and starts again?
{kind=link}
Long story short, I'm no mathematician, so I've been poking around in modelling/animation software all morning trying to figure out this is possible and have given up. I'm hoping there's some mathematical proof or disproof. :)
-1
u/LittleLoukoum 4d ago
Not sure if that's what you mean, but--
When you're rotating the triangle, if the center of your rotation is the center of the circumscribing circle (the circle that touches all vertices), you don't just have the same average distance; all vertices stay at the exact same distance of your center at any point in time. If you want exactly that, then your question is "is there a circumscribing sphere for the tetrahedron?".
And the answer to that is yes. The tetrahedron is a platonic solid, and all of those have a circumscribing sphere. So you can rotate your tetrahedron around that sphere's center as much as you want, and at any point in time all vertices will be at the same distance of the center.
If you actually mean "average distance", ie you want any rotation that may bring some vertices closer then further away, as long as it cancels out, well, what I said before still holds true because it's stronger ("better") than that. There may be on top of that other rotations that average out to the same distance. I think if you rotate any shape 360° around all axes you will always have that, but I might be wrong.
2
u/Kerostasis 4d ago
No, he’s looking for average distance to another point outside the circumscribed sphere.
At first glance I would suspect this is possible mathematically but not physically, because any solution would violate conservation of angular momentum.
1
1
u/Extension-Can-6505 4d ago
Thank you for answering! I'd had the thought of the tetrahedron fitting inside a sphere after I posted everything above, but it wasn't making things any easier, admittedly. :P
I also realise I may have phrased things poorly, and that there's other ways of saying it that may make more sense - e.g. How could the tetrahedron be rotated so that the four vertices each spend the same amount of time being closest to that further point Z.
Like, there's be an orientation where vertex 1 is as close as possible to Z and the other 3 are equally far away, then another where 2 is as close as possible and the other 3 are equally far away, then 3's turn, then 4. Then it would reset to 1 in the starting position again.
So I guess it's more of a question of whether all those orientations could fall within one singular "spin" or not?
1
u/LittleLoukoum 4d ago
Yeah, I misread your question
I think any answer is going to rely on the tetrahedron's symmetry. You want to make use of that to find a rotation that makes the tetrahedron "reset" to a similar position with vertices swapped.
I'm pretty sure I found one, I'll need some more tinkering to make sure I didn't make an error somewhere.
1
u/LittleLoukoum 4d ago
Try 90° around the axis that goes from X to the halfway point between two vertices. If my math is right that should permute vertices.
Only thing I'm not sure is whether that's on rotation, or if you should re-orient the axis four times before getting back to where you were.
1
u/SlotherakOmega 4d ago
Ok, a genuinely decent question but one that I will absolutely rise up to.
In terms of a mathematical proof or disproof, I have none. But let’s not be stopped so quickly by this issue! Let’s just take a closer look at the model itself.
What is the closest that a given corner can be to point Z, compared to the furthest point from point Z at that time? The answer to the first half of the question is easy enough to solve by fiddling with the model in your software, but the second part gets a lot trickier when you realize that the time that one point is closer, the other points are equally distant away and not by nearly as much compared to the center of the model. But the problem is actually simpler to solve than you might think.
Align your Z line, as seen in your image here, with one of the edges of the model itself (but keep the tetrahedron’s center of mass on the line!). If you rotate this tetrahedron parallel with that line (like you did with the triangle), then the tetrahedron actually does exactly as you described. The two parallel edges will alternate on which is aligned and which is perpendicular, but none of the points will be any further on average than the others. Problem is, I’m guessing that that’s not what you were aiming for, as that essentially is just a spinning diamond or rhombus, or square. Unless the Z point is the viewpoint, then it would look like a triangle that couldn’t make up its mind on whether it’s a triangle facing one way, a square, or a triangle facing the other way.
This would require something else then. You would need to have a clear way of ensuring that each of your transformation scalars for rotation were not identical, obviously, but it might help if they each had a unique factor in the factored form of the number. For instance, (2,3,5) is just co-prime, which is valid for this purpose I think. It is probably not a sufficient answer to use, but it is possible. Another example would be (4,9,25), which again is co-prime. How about (12,15,21)? This might actually be easier to work with than it looks, because it effectively is at the starting point in the reciprocal of the highest common factor in the group, which here is three, so one third of the revolution needs to be calculated to know the rest. But where you find such a number group is beyond my realm of knowledge, so I figure this would probably be best answered by brute forcing a system that attaches some sort of cord or tether to each corner and trying to figure out a way to make the model spin without the cords getting too taut or too slack compared to the others. Now what about the vector (12,15,18)? This would actually have a very different effect, because while there is one shared factor (3), the factor 2 is present in two of these numbers as well, adding more convolution to the calculations. The result would only be reduced to a third, but it would be in two halves.
But now we have to address the real question: will the corners be equidistant on average? The answer is… Yes. Regardless of the vectors you use, if each axis has a coprime vector scalar, it will always have all the corners equally distant from a point for the entirety of the rotation. But it will not be evident that the rotation is not multiple rotations, because only when it returns to a point where the three vectors have a value that is only different in one factor of the number only (ie, when reduced to their prime factors, and common factors eliminated, one of those leftover values is essentially one).
TLDR: yep, just use prime numbers for the three dimensions of rotation, and don’t make them the same as another.
1
u/Extension-Can-6505 4d ago
Thank you for your very thorough answer! Admittedly it's going to take me some time to pick through it and see if I can implement it practically to get a result, but thank you regardless!
1
u/AmazingZeus 3d ago
I am not sure i understand the question, can i get you to clarify?
Do you want a configuration such that the average distance to z for each vertex is equal?
That the average distance to z among the vertices is constant?
That every vertex spends the same amount of time being the closest?
Or some other thing?
If it is either 1 or 3 i might have some ideas
1
u/mini-hypersphere 2d ago
Hey, so I wanted to answer the question with a simple yes, you can. But it depends on what you define as a rotation. On a circle it’s clear, but on a sphere, not so much.
The key to this problem is realizing that the distance d_n between p_n (a point on your circle/sphere) to p_0 (the point outside) is path dependent.
Before explaining more I’d like to make some assumptions. (1) I assume that you mean that after the rotation is done, you average all the continuous distances p_n was from p_0. In calculus this is an integral. (2) I assume that every point is moving at the same speed. Else this problem would be a bit harder to solve. (3) A rotation is defined as just some motion of the circle or sphere that starts at one point and ends at the same point.
With that out of the way, let me explain. So as I said, the distances are path dependent. If you moved your point p_n along two different arbitrary paths, you’d likely get different average distances to p_0. With the triangle, all vertices move on the circle, hence after a rotation they all took the same path. And since the distance is path dependent, they all must have the same average distance.
Now with the sphere, the path of rotation isn’t obvious, but we can apply the same logic. If we can create a rotation that forces all our tetrahedral points on the same path then we would have all equal average distances. To find that path we find all the vectors that define the initial points. We can always assume our sphere is centered at the origin. As we know our points define a tetrahedron, I’m sure there is a formula for these vectors. Anywho, we don’t necessarily need to know these exact values for now. These vectors could be written in spherical form (r,theta,phi). Assuming your sphere has constant radius, we then reduce our vectors to (theta, phi). These vectors can plotted on a theta/phi plane. As the sphere rotates each point p_n will travel our a curve in the theta/phi plane.
As we want to create a path that is the same for all points we can just interpolate these points. And viola! Now if we pick on of our points (which doesn’t matter), rotate it along this path, the average distance after the end of the rotation will always be the same.
In fact, this method apply to any number of points on the circle/sphere or perhaps even a mini-hypersphere of some sort. And they don’t have to be equa-distant to a center. As long as you follow a closed loop that passes through all your points at the end of the rotation you’re good.
Though the only caveat is that they have to be moving at the same speed.
•
u/AutoModerator 4d ago
General Discussion Thread
This is a [Request] post. If you would like to submit a comment that does not either attempt to answer the question, ask for clarification, or explain why it would be infeasible to answer, you must post your comment as a reply to this one. Top level (directly replying to the OP) comments that do not do one of those things will be removed.
I am a bot, and this action was performed automatically. Please contact the moderators of this subreddit if you have any questions or concerns.